PDJ Weekly Livestream # 23 – Update
This week had lots of simulating and battling with plotly to make nice plots. I’m quite happy with how it all came together!
🔗 Here’s a link to the project’s Github page:
https://github.com/Project-DeepBlue-Juggling/Jugglebot
If you’re specifically interested in the code used in the simulation, you can find it here:
https://github.com/Project-DeepBlue-Juggling/Jugglebot/tree/develop/simulations/stewart_platform_geometry_study
🔗 Link to the Onshape document:
https://cad.onshape.com/documents/eabf167381f1d773e576e023/w/4482fde6a2cb9e7dec676ff9/e/e135cef6cb7d1fa6adbde284
🔗 Here’s the RTOS article I mention towards the end of the stream:
https://www.linuxfoundation.org/blog/blog/intro-to-real-time-linux-for-embedded-developers
🔗 And to the project’s Zulip site:
https://pdj.zulipchat.com/
🔗 If you want to help support this project, the best way to do so is through my Patreon, here:
https://www.patreon.com/HarrisonLow
00:00 – Intro Animation
05:10 – How I made this Animation
09:27 – I Misremembered my Old Sim!
12:30 – How to Set up the New Simulation?
16:15 – How to Score Each Geometry/Pose?
23:45 – Validating the Simulation
31:06 – Batch-Testing LOTS of Geometries
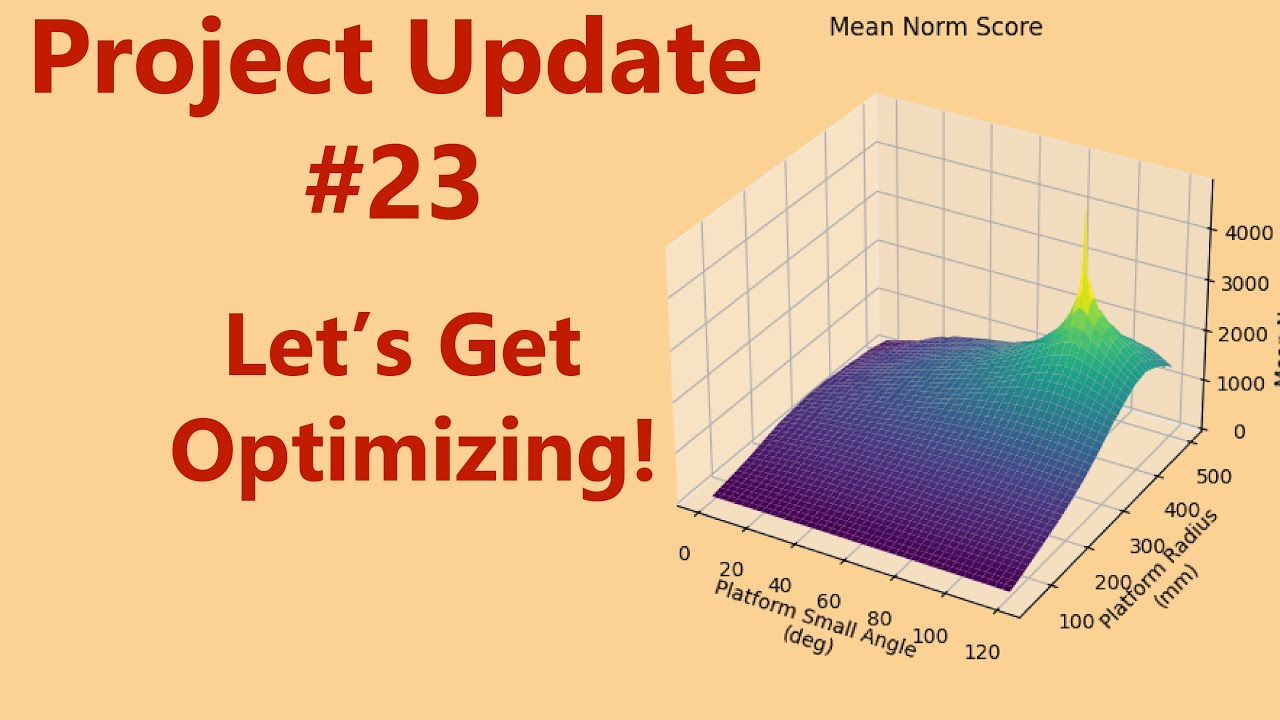
32:50 – Analysing the Results
44:30 – Will These Geometries be Structurally Sound?
52:45 – A Strange Result of the Simulation
57:40 – My Battle with Plotly
59:50 – My Desire to Add to Open-Source
1:02:00 – General Thoughts on The Simulation
1:07:19 – Update on Throw Testing
by Harrison Low
linux foundation



Buy a second Jetson and install the RTOS on that.
Something feels off about the results of the simulation. Imagine the platform with radius 50 mm, moving one actuator a tiny bit will rotate the platform by a lot. Taking into account the inertia of the platform, the force required by the arm is huge and needs to be very stiff. It will be very sensitive and vibrate a lot.
Maybe you could separate linear and rotational results of the simulation.
Btw, I love the way you're approaching this. Using simulations for optimization is a great way to get the most out of juggle bot
Something feels off about the results of the simulation. Imagine the platform with radius 50 mm, moving one actuator a tiny bit will rotate the platform by a lot. Taking into account the inertia of the platform, the force required by the arm is huge and needs to be very stiff. It will be very sensitive and vibrate a lot.
Maybe you could separate linear and rotational results of the simulation.
Btw, I love the way you're approaching this. Using simulations for optimization is a great way to get the most out of juggle bot
49:11ish – not necessarily a solution, but – something in the hand is based off of the assembly in order for it to have its offset. if you can break that dependency in a way (i.e. remove contextual reference from the part), then the change will reflect in the assembly immediately
I think for the simulation it should be enough if you only check like 120° (I'm not sure aboute the actual number) of the cone since the platform is symmetric. 🤔
instead of syncing the jetson and the teensy, have jetson add commands to the end of a queue, and have teensy pull from the front of the queue. as long as jetson is running faster than teensy, the teensy will be real time.
Since you mostly move the hand and the platform at different times, having separate CAN busses for them seems like it would be a waste. Can you just get the platform to hold position and leave all the bandwidth for the hand when doing the throw?